Unmanned Aerial Vehicles (UAVs) are commonly used in monitoring applications. Among UAVs, fixed wing UAVs have the longest endurance and range.However, they can be difficult to control, particularly in turbulent conditions.
This research focuses on the problem of determining the set of safe input sequences that can be commanded by a user (or an autopilot) to a UAV. A safe input sequence is a sequence that will not lead to an excursion outside of the flight envelope of the UAV, given a certain time horizon. Once this set can be computed in real time, it effectively acts as a supervisory control for either the pilot or an autopilot, automatically overriding their inputs whenever these inputs would be unsafe.
This requires solving the following two problems.
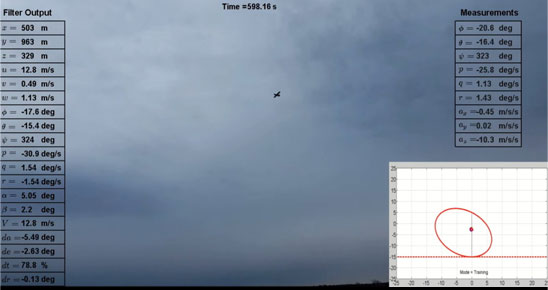
1) Estimation of the states of a UAV in real time, from inertial data. We solve this problem using a combination of Unscented Kalman Filtering (UKF) with supervised learning-based soft sensing of air data (from inertial measurements).
2) Computation of the safe input sequences in real time, based on the estimated UAV states. Given the very high dimensionality of the problem (and the nonlinearities of the dynamical model), we use supervised learning to determine the safe input sequence set coefficients (which are described as hyperellipsoids). While not offering safety guarantees (unlike a dynamic programming or Viability approach), this algorithm can be implemented in a low power embedded computer. In the current implementation, the computer determines the parameters of a 12 dimensional ellipsoid 10 times per second, from 15 state input data. This ellipsoid is then used to override the pilot inputs in real time to prevent stalls, spins, over g or over speed events.