Traffic flow is usually monitored with fixed sensors, including inductive loop detectors, traffic cameras, magnetometers and radars. A new form of sensing appeared in the 2000's in the form of mobile (floating car) data, also known as probe data. Probe data consists in vehicles equipped with satellite positioning systems, which transmit their location and speed information to a central server for processing.
While satellite positioning systems work well in the context of large roads, they fail to provide good enough data in cities, for multiple reasons. In particular, positioning data obtained in an urban environment is less accurate, and traffic stops are not necessarily caused by congestion, but can also be due to traffic signals, or passenger drop off/pickup.
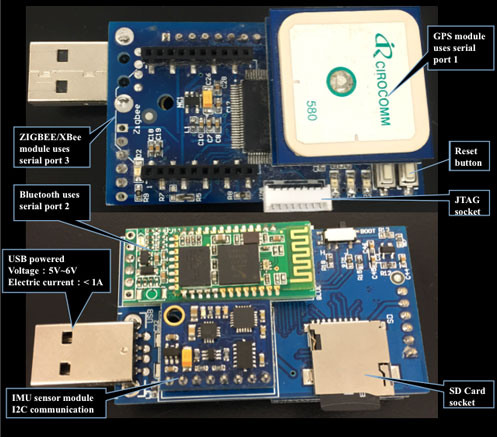
We developed a new type of mobile traffic sensor based on an Inertial Measurement Unit (IMU) only. This type of sensor estimates the path of a vehicle, and estimates traffic conditions along the path more accurately than a GPS system, detecting for example stop and go waves, and classifying stops as traffic related or not. The data generated by this device is sent to a local sensing infrastructure, which assists in determining the actual vehicle position, using the local topology of the road network.